Guido
Robotics
Most Innovative Hack @ HackUSF 2026
An autonomous wheelchair that can navigate using SLAM, waypoints, and natural voice commands.
C++ROS2Google ADKPythonSLAMNVIDIA SDKJetson Orin Nano
images



build notes
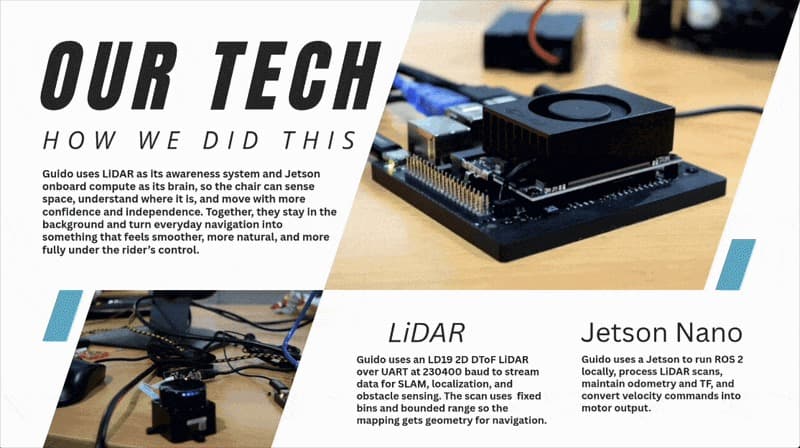
- - Built an autonomous, voice-controlled wheelchair system from scratch using ROS 2 Humble, LiDAR-based SLAM, and Nav2 on an NVIDIA Jetson Orin Nano.
- - Engineered a layered autonomy architecture with separated command handling, supervisory logic, and Nav2 execution nodes.
- - Developed a full-stack voice-to-motion pipeline that translates natural language into real-time motor control through a Jetson-to-Arduino serial bridge.